TEXT:張凱安 Kyle
PHOTO:張凱安 Kyle
隨著人類求新求變的慾望不斷進化,科技日新月異,倍速發展的進程想必大家都是有目共睹,從與生活密不可分的網路、功能強大無所不能的智慧型手機,一直到安全配備不斷革新的汽車科技皆是如此。過去我們只要車子能跑就好,漸漸地我們不只要車子跑得快、跑得舒服,還要非常安全,而至今我們對車的慾望又再度更上一層樓,期望這個交通工具能夠在無人操控的狀況下,完成乘載移動之功能。
PHOTO:張凱安 Kyle
隨著人類求新求變的慾望不斷進化,科技日新月異,倍速發展的進程想必大家都是有目共睹,從與生活密不可分的網路、功能強大無所不能的智慧型手機,一直到安全配備不斷革新的汽車科技皆是如此。過去我們只要車子能跑就好,漸漸地我們不只要車子跑得快、跑得舒服,還要非常安全,而至今我們對車的慾望又再度更上一層樓,期望這個交通工具能夠在無人操控的狀況下,完成乘載移動之功能。

「自動駕駛」這個聽起來曾經遙不可及,只出現在科幻電影中出現的技術,在科技爆發性的進化之下,如今不只是國外車廠、知名科技大廠具備這類基礎技術及研發能源,其實就連台灣也擁有自動駕駛的相關技術,而且其技術的成熟度甚至還超過一般大眾的想像。

為了見識國內現階段成熟度最高的自動駕駛技術,我們再度來到位於台中鹿港彰濱工業區的ARTC車輛研究測試中心大本營。本次ARTC所展演的自動駕駛技術分成兩個部分,分別為「一般道路自駕車」及「定點接駁自駕車」雙模式,而這兩種模式皆設有一般道路上常見的數種交通情境,以展現自駕車於不同的情境下做出的安全反應。

每輛自駕車皆具備GPS系統
ARTC自動駕駛車運作原理是利用光達、雷達與影像辨識等多感知融合技術提供道路環境資訊,透過精密的演算與決策,做出最適當的行駛判斷,再搭配轉向、油門與煞車等系統控制,透過車載聯網智慧型裝置與外界溝通,實現自駕車遠端監控與智慧運輸接駁服務

上方的圓形物為3D-LIDAR感應器,可以感測障礙物、下方則是用於識別障礙物的鏡頭


接駁站牌
以高爾夫球車作為研發基礎的定點接駁自駕車,最高時速可達12km/h,安全行駛時速則是10km/h,基本上從最一開始坐上去、按下平板上的出發鍵後,你就不用進行任何操控,只需要在你想下車的接駁站下車即可,而且在應對摩托車闖入、靠站接駁、前方車輛慢速、行人衝出、路口減速、T字路口自行車匯入等多種交通情境的時候,它的反應速度合宜,而且給人的感受十分安全。


完全藉由平板控制
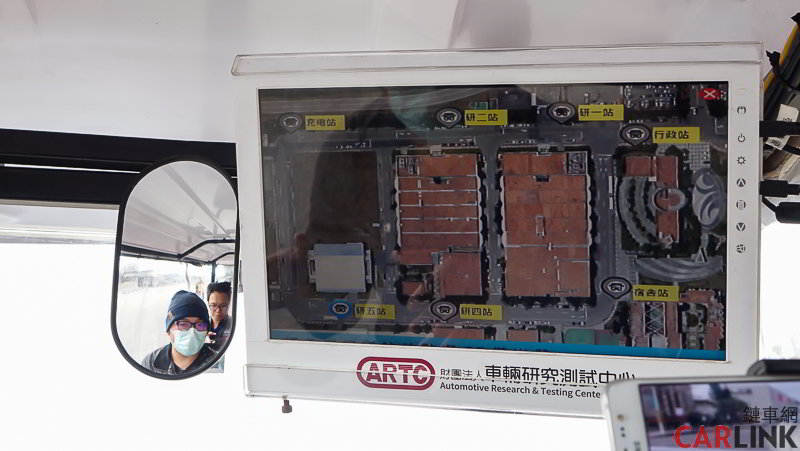
車內上方亦設有一個顯示車輛所屬位置的大螢幕

因研究人員需時常透過手機監測自駕系統,在高爾夫車上設有幫助手機維持電量的無線充電座

外型意外動感的方向盤
高爾夫球車的原始啟動鍵
既然名為定點接駁,那這套自駕系統未來勢必是應用於公車、遊園車這類會依循著同樣的路徑,進行人員接駁的交通工具。和真實的人類駕駛相比,這輛自駕車的反應速度雖然比較慢,遇到狀況也都採取安全至上、較為耗時的減速控距處理方式,但卻是一個在無人的情況下,一般人願意接受且信任的移動工具,就像是捷運或是機場航廈之間的接駁電車,因為它提供了一個安全、輕鬆的交通選擇。

機車闖入情境

自行車闖入T型路口
一般道路自駕車就跟我們熟知的汽車比較有關聯了,不少汽車品牌現在都有自己的半自動駕駛系統,而且其中如賓士、VOLVO的半自駕系統的成熟度更幾乎與自動駕駛無異。

透過手機app呼叫自駕車

自園區緩緩駛出的自駕U6

除了在車頭水箱護罩上有RADAR之外,車頂另設有3D-LIDAR與鏡頭
ARTC所規劃的一般道路自駕車體驗貨真價實就是在一般道路上實行,其體驗使用的車款則是LUXGEN U6。有鑑於所有的自駕車都需要在行車電腦中建設完整的地圖資料,ARTC一般道路自駕車與定點接駁自駕車差異並不大,因為它們的自駕系統目前僅擁有作為測試用途的特定路徑圖資,只能在這些特定路徑上行駛,簡單說就是無法想去哪裡就去哪裡,只能走在同一條路徑上。


監測平板

在車內同樣可以透過手機app控制路徑上的停車地點
實際體驗下來,我認為定點接駁自駕車與一般道路自駕車最大的差異就在於車速與平順度。定點接駁自駕車的研發基礎是高爾夫球車,能發揮的車速本來就不高,因車速所帶來的物理性回饋強度也低上許多;相反地,一般道路自駕車的研發基礎是一輛極速可達100多公里的汽車,不只是加速、煞車反應表現比高爾夫球車明顯,其速度也快上許多,因此在實際乘坐過程中,兩類自駕車雖然都一樣很安全,但U6遇到交通情境的加減速、甚至煞車的反應卻不是很平順,或許是因為車廠的自駕系統是與車輛本身的行車科技一體成形、共同打造,而ARTC則是透過對車輛加裝外來的系統及配備來實現自動駕駛。

文及至此,我想大家都應該了解到其實在台灣就有所謂的自駕車技術及研發能量。ARTC之所以會舉辦這類的自駕車技術展演及體驗活動,主要目的除了展現他們具備可檢測自駕或相關主動式安全配備的技術及設備外,更期望藉此與車廠或第三方企業合作,開發更完善的自駕系統,畢竟只有在更充裕的資源投注下,他們才能逐一克服如上述的圖資路徑拓建及自駕車行駛平順及舒適性等等的技術性問題,至於國內何時會有搭載自駕系統的車款、台灣法規能否修正並開放自駕車上路行駛等問題,只能待政府何時願意早一步瞭解這必定的未來趨勢,並進一步做出討論與規劃時才有結果了。