有鑒於當今行車輔助技術日新月異,且大眾對於行車安全議題愈加重視,對於各項輔助系統的準確率,勢必需要相對應檢測標準;好比AEB(自動緊急煞車系統),自2014年起,已納入Euro-NCAP安全評比項目之一,同時台灣也跟進並訂定了適用於大車的AEB法規,預計於明年實行,因此國內車輛研究測試中心ARTC特別展示了幾項行車輔助系統的測驗,讓我們一起來看看吧!ㄧ.大型車AEB檢測此測驗為審視大貨車緊急狀況下,AEB自動急煞系統是否有作用,以及其作動的精準度。測試車輛分為大貨車與前方受追撞車,大貨車車速訂定80km/h、受追撞車車速12km/h,在一長型跑道上模擬上路狀況,大貨車以80km/h逼近前方目標車,兩者約莫距離120m時,測驗貨車內的AEB系統是否先行發出警示,接著檢視AEB緊急煞停的動作,並透過結果數據分析,審視避免追撞前車的安全效果精準度。
有鑒於當今行車輔助技術日新月異,且大眾對於行車安全議題愈加重視,對於各項輔助系統的準確率,勢必需要相對應檢測標準;好比AEB(自動緊急煞車系統),自2014年起,已納入Euro-NCAP安全評比項目之一,同時台灣也跟進並訂定了適用於大車的AEB法規,預計於明年實行,因此國內車輛研究測試中心ARTC特別展示了幾項行車輔助系統的測驗,讓我們一起來看看吧!ㄧ.大型車AEB檢測此測驗為審視大貨車緊急狀況下,AEB自動急煞系統是否有作用,以及其作動的精準度。測試車輛分為大貨車與前方受追撞車,大貨車車速訂定80km/h、受追撞車車速12km/h,在一長型跑道上模擬上路狀況,大貨車以80km/h逼近前方目標車,兩者約莫距離120m時,測驗貨車內的AEB系統是否先行發出警示,接著檢視AEB緊急煞停的動作,並透過結果數據分析,審視避免追撞前車的安全效果精準度。
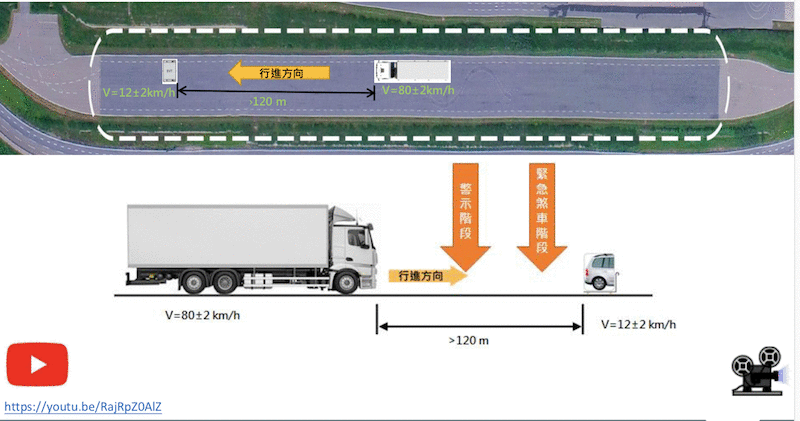
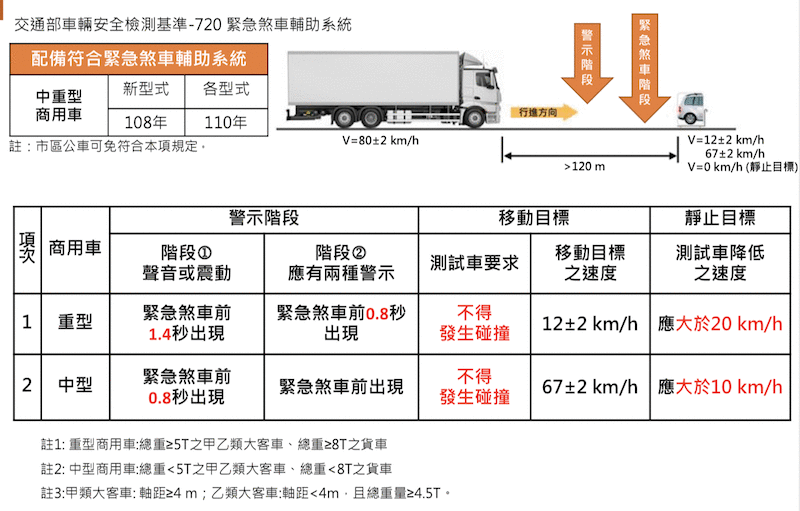
(海外AEB測試畫面)
二.駕駛機器人之路徑控制精準度本測驗為展示ARTC之檢測儀器精度,將場地以交通錐佈成一大圈子,其中包含大型彎、直線與蛇行繞錐,並以自動轉向機器人駕駛車輛繞行該場地。
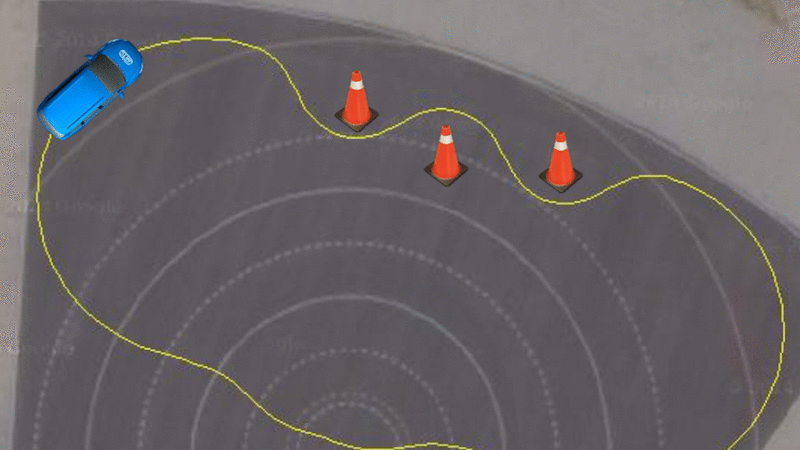
自動轉向機器人可控制方向盤舵角、油門、煞車,測試員將這些參數設定好後,透過車上GPS精準即時定位,機器人得以隨時做出最佳路徑,展現機器人以精準的設定,駕車完成繞場動作。

有趣的是,每個錐子側邊都黏有一面鑼、車身側邊黏上一隻棒,車輛邊行走、轉彎之時,我們可以看見棒子藉由車輛漂亮的轉彎曲線敲響錐子側邊所擺設的鑼,展現車輛行駛在規劃路徑時, 透過不同車速狀況模擬變換車道或轉向途中行經目標物,在機器人的控制下依然能精準維持路徑。


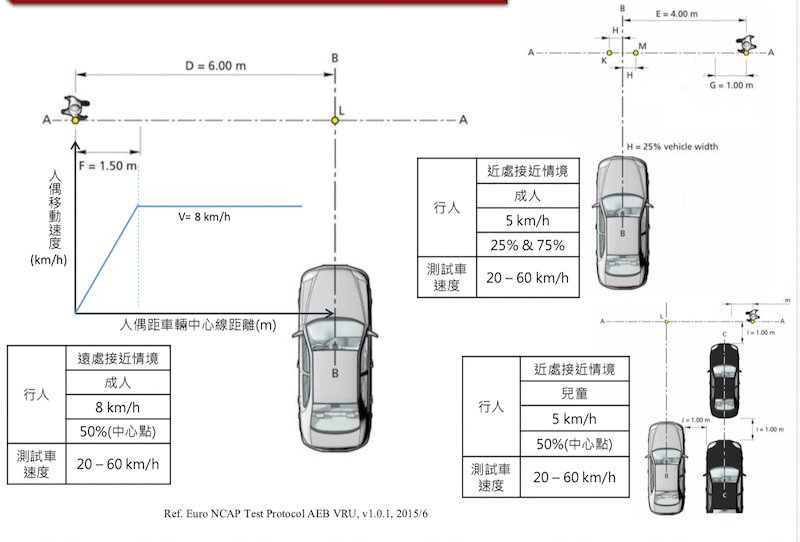
三.行人牽引系統精準度該測驗為展示“行人碰撞模擬”之精準度,測試員將車輛行走方向與行人方向設為一垂直相交路徑,透過電腦設定行人遭受車輛撞擊時,行人可落在車子正中心或任意偏移量,模擬AEB感測行人之情境,展現滑軌機器精準度。 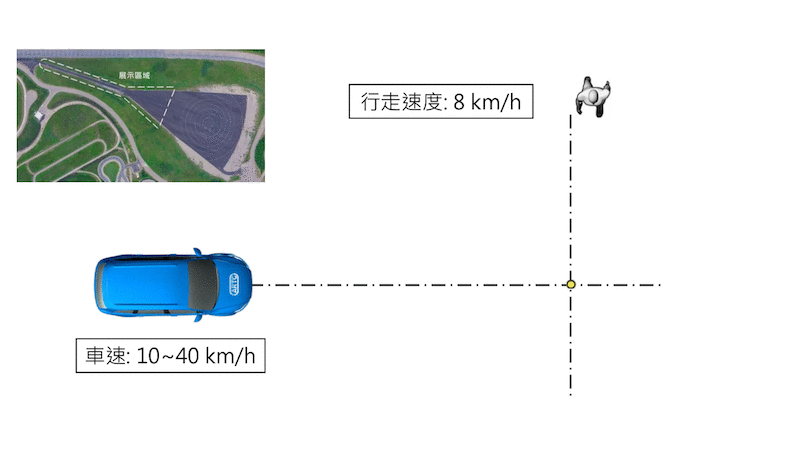

(此次測驗以交通錐示意行人)

據了解,目前ARTC 已建置與歐洲同步且符合國際標準之AEB系統驗證技術,可實施行人防撞偵測功能測試(AEB Pedestrian)、AEB NCAP 主動安全系統驗證技術(AEB City & AEB Inter-Urban)等,而歐洲最具公信力的新車安全評鑑系統 (Euro-NCAP) 已於2014 年將AEB系統納入其必要之評鑑項目,也就是說,在此制度推行後,往後沒有AEB功能的車輛大概無法在此具有公信力的評等上取得高分。其他國家的車輛安全相關評鑑機構,如美國公路安全保險協會(Insurance Institute for Highway Safety,IIHS) 、美國新車安全評鑑系統 (US-NCAP)、日本新車安全評鑑系統 (J-NCAP)、也陸續跟進,而當今各大車廠所推出的新型車款已逐步配置這項功能,在安全科技上也成為了一項趨勢,不可忽視。